MImE Environments

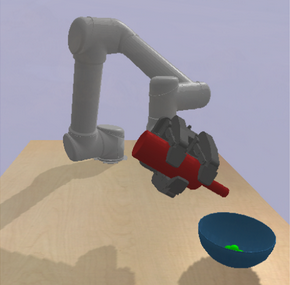
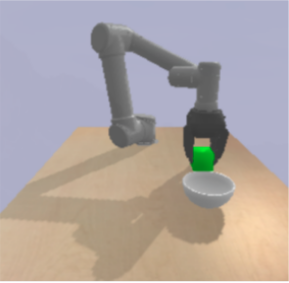
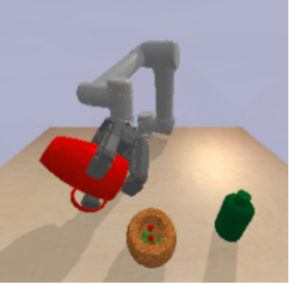
MImE is composed of 4 robotic environments for manipulation. In every environments, the agent controls the robot end-effector and observes the environment through a camera placed in front of the robot. The goal of the agent is to output the correct sequence of actions to perform the task at hand. In UR5-Pick, a cube is on the table and the goal is to grasp a cube and lift it in the air. In UR5-Pour, a bottle is chosen among a set of Shapenet bottles and set on the table. The agent has to pour the bottle content into a bowl without spilling drops. In UR5-Bowl, a cube and a bowl are on the table, the agent has to put the cube into the bowl. In UR5-Breakfast, the goal is to prepare a simple breakfast, a bottle and a cup are on the table and the goal is to pour the two containers in the bowl without spilling drops.