Introduction
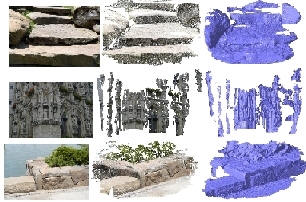
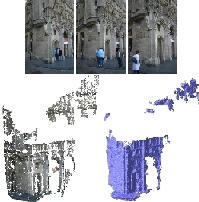
PMVS is a multi-view stereo software that takes a set of images and camera parameters, then reconstructs 3D structure of an object or a scene visible in the images. Only rigid structure is reconstructed, in other words, the software automatically ignores non-rigid objects such as pedestrians in front of a building (See examples in our gallery). The software outputs a set of oriented points instead of a polygonal (or a mesh) model, where both the 3D coordinate and the surface normal are estimated at each oriented point. Michael Misha Kazhdan provides a couple of programs that convert a set of oriented points into a surface model, and you can download his software from his website.
Our software can be downloaded (after signing
the agreement form and waiting for the acknowledgement) from
here.
We provide binary versions of our software for
Windows, which
were compiled on a 32bit Windows XP machine. Note that this is a
multi-view stereo software that assumes that cameras are already calibrated.
You have to calibrate your cameras before using our software.
Quantitative evaluations of our software is found at the
Multi-View
Stereo Evaluation website. As of 9/25/2007, our software has the best
results (both in terms of accuracy and completeness) for 4 out
of their 6 data sets. The algorithm implemented in the software is described
in our
CVPR 2007 paper. You can find our 3D photography data sets
here and
there. Note that many data sets in the examples do not belong to us, and
hence we cannot distribute them.

Contacts
For
comments or bug-reports, you can write to Yasutaka Furukawa
(furukawa -at- cs.washington.edu). Please use "multi view
stereo" as a subject of an email. However, we do not
provide any support or help regarding the software beyond the
documentation, as we are getting many emails and will not have
time to answer each one of them.
Reconstruction Examples (more in our gallery)
|
|
|