Reconnaissance d’objets et vision artificielle
2009/2010
Object recognition and computer vision 2009/2010

Assignment 4:
Simple Face Detector
Jean Ponce, Ivan Laptev,
Cordelia Schmid and Josef Sivic
Due date: December 8th 2009
The goal of this assignment is to implement a simple face detector. You
will experiment with the so-called “window-scanning” method by implementing its
main steps and analyzing detection performance on real images. We will consider
a rather simple implementation of the detector to (a) have a better overview of
the method and (b) to understand the need of more sophisticated detection tools
for achieving better performance. An extended and better performing version of
object detection will be considered in the final assignment of this course.
Data and code for download
- Training and test images
- Alternative SVM packages with interface to Matlab
SVM-light (recommended)
LibSVM
STPRTool
(In most cases these packages should work directly on your Windows/Linux systems. In some cases, however, you may need to compile them, see instructions inside packages in this case)
Task description
1.
Normalize training images: load positive and negative training
images from images/possamples.mat and images/negsamples.mat respectively. These
are 24x24 pixel grey-scale image patches with cropped faces and non-faces
concatenated along the 3rd array dimension. To reduce effect of light
variation, write a function to normalize input pixels of each individual patch
to the mean value 0 and standard deviation 1.
2.
Train linear SVM: for a subset of 1000 positive and 1000 negative
normalized patches train a linear SVM model using e.g. <svmlearn>
function of SVM-light package (hint: use matlab command <reshape> to
transform 3D array with N image patches to 2D array with N columns representing
pixel values of patches stacked into vectors).
a.
Validate recognition accuracy on a separate validation
set of 1000 positive and 1000 negative normalized patches using <svmclassify>
function of SVM-light
b.
Analyze and report
accuracies for different values of C-parameter of SVM, choose the best C
(hint: try small C-values in the range 0.1- 0.0001)
c.
Reconstruct decision hyper-plane W from support
vectors and implement your own linear classifier of the form confidence=W*X+b Make
sure that your classifier confidence>0 gives exactly the same result as <svmclassify>
(hint: for SVM-light package you will find values alpha_i * y_i for training samples x_i
stored in model.a(i), parameter b is saved in model.b)
d.
“Reshape-back” the hyperplane W into a 24x24
patch, display it with <imagesc> (you should see something meaningful!), include the plot into your report and
discuss it
e.
Re-train linear SVM classifier using all
available training samples and the best found C-value.
3.
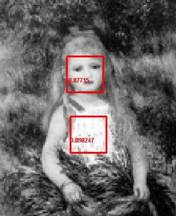
Scanning-window detection: implement a function that for a given image (i) generates bounding boxes of size 24x24
pixels for all valid positions (ii) crops an image into overlapping  patches according to all bounding boxes; (iii) normalizes all patches separately
as done for training images in Step 1 above (iv) classifies all patches using linear
SVM model trained in Step 2-e above; (v) returns bounding boxes, corresponding normalized
patches and confidence scores for all high-confident detections. Apply your
window-scanning function to jpeg test images in images/ folder and display original
images + rectangles corresponding to high confident detections (i.e.
conf>0). Include images with
detections in your report (hint1: use your own classifier of the form conf=W*X+b
as it tends to be much faster compared to <svmclassify> function of
SVM-light; hint2: use matlab function rectangle(‘Position’,[x y width height])
to plot rectangles on top of the image). Example result of what you should
expect to get at this step is illustrated on the right.
patches according to all bounding boxes; (iii) normalizes all patches separately
as done for training images in Step 1 above (iv) classifies all patches using linear
SVM model trained in Step 2-e above; (v) returns bounding boxes, corresponding normalized
patches and confidence scores for all high-confident detections. Apply your
window-scanning function to jpeg test images in images/ folder and display original
images + rectangles corresponding to high confident detections (i.e.
conf>0). Include images with
detections in your report (hint1: use your own classifier of the form conf=W*X+b
as it tends to be much faster compared to <svmclassify> function of
SVM-light; hint2: use matlab function rectangle(‘Position’,[x y width height])
to plot rectangles on top of the image). Example result of what you should
expect to get at this step is illustrated on the right.
4.
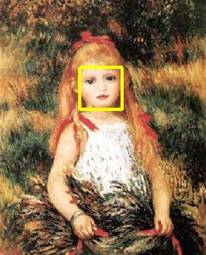
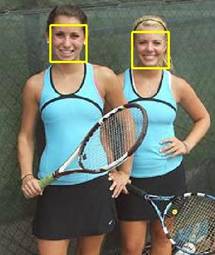
 Non-maximum suppression: write a function that merges multiple detections with similar
coordinates. For this you can follow agglomerative clustering algorithm as
follows: (i) choose bounding box D corresponding to the most confident
detection in the list, (ii) find all detections with sufficient overlap to D,
(iii) average selected detections into one bounding box and assign its
confidence by the confidence of D, (iv) remove merged detections from the list and
continue with Steps (i)-(iii) until all
detections are merged. Manually find a suitable confidence threshold and
display obtained detection with confidence>threshold using the same
threshold for all images, include plots
into your report, discuss correct detections and failure cases. (hint: to
measure overlap between two bounding boxes A,B use ratio IntersectionArea(A,B)/UnionArea(A,B))
Example result of what you should expect to get at this step is illustrated on
the right.
Non-maximum suppression: write a function that merges multiple detections with similar
coordinates. For this you can follow agglomerative clustering algorithm as
follows: (i) choose bounding box D corresponding to the most confident
detection in the list, (ii) find all detections with sufficient overlap to D,
(iii) average selected detections into one bounding box and assign its
confidence by the confidence of D, (iv) remove merged detections from the list and
continue with Steps (i)-(iii) until all
detections are merged. Manually find a suitable confidence threshold and
display obtained detection with confidence>threshold using the same
threshold for all images, include plots
into your report, discuss correct detections and failure cases. (hint: to
measure overlap between two bounding boxes A,B use ratio IntersectionArea(A,B)/UnionArea(A,B))
Example result of what you should expect to get at this step is illustrated on
the right.
5.
Improve detections with non-linear SVM (optional): As you may have noticed, the developed
linear SVM detector is not perfect. A
simple way to improve the detector performance is to apply a more costly and
sophisticated classifier to the set of initial detections. Train a non-linear
SVM classifier with RBF kernel using the same training data as in Step 2-e
above. Try SVM RBF parameter gamma=0.002 and C=10. Non-linear SVM is rather slow
to evaluate on all image windows. Instead, apply it to the initially detected patches
in Step 3 followed by the non-maximum suppression in Step 4. You should see
improved detection results. (Note: you cannot use a linear classifier function
conf=W*X+b in the case of non-linear SVM).
What to hand in
You should hand in your code together with a
brief report illustrating the steps of your experiments:
1.
Accuracy values on the validation set when
training linear SVM for different C-values in Step 1-b
2.
Visualization of the linear hyperplane W in Step
2-d
3.
High-confident scanning-window detections on
test images in Step 3
4.
Results of non-maximum suppression applied to
detections on test images in Step 4 + discussion of results
5.
(Optional) improved detection results using
non-linear classifier.
Instructions for formatting and handing-in assignments:
- At the top of the first page of your report include (i) your name,
(ii) date, (iii) the assignment number and (iv) the assignment title.
- The report should be a single pdf file and should be named using
the following format: A#_lastname_firstname.pdf, where you replace # with
the assignment number and “firstname” and “lastname” with your name, e.g. A4_Laptev_Ivan.pdf.
- Zip your code into a single zip file using the same naming
convention as above, e.g. A4_Laptev_Ivan.zip. We do not intend to
run your code, but we may look at it and try to run it if your results
look wrong.
Send the pdf file of your report and the zipped code in two separate
files to Ivan Laptev <Ivan.Laptev@ens.fr>